No items found.


Performance & Energy




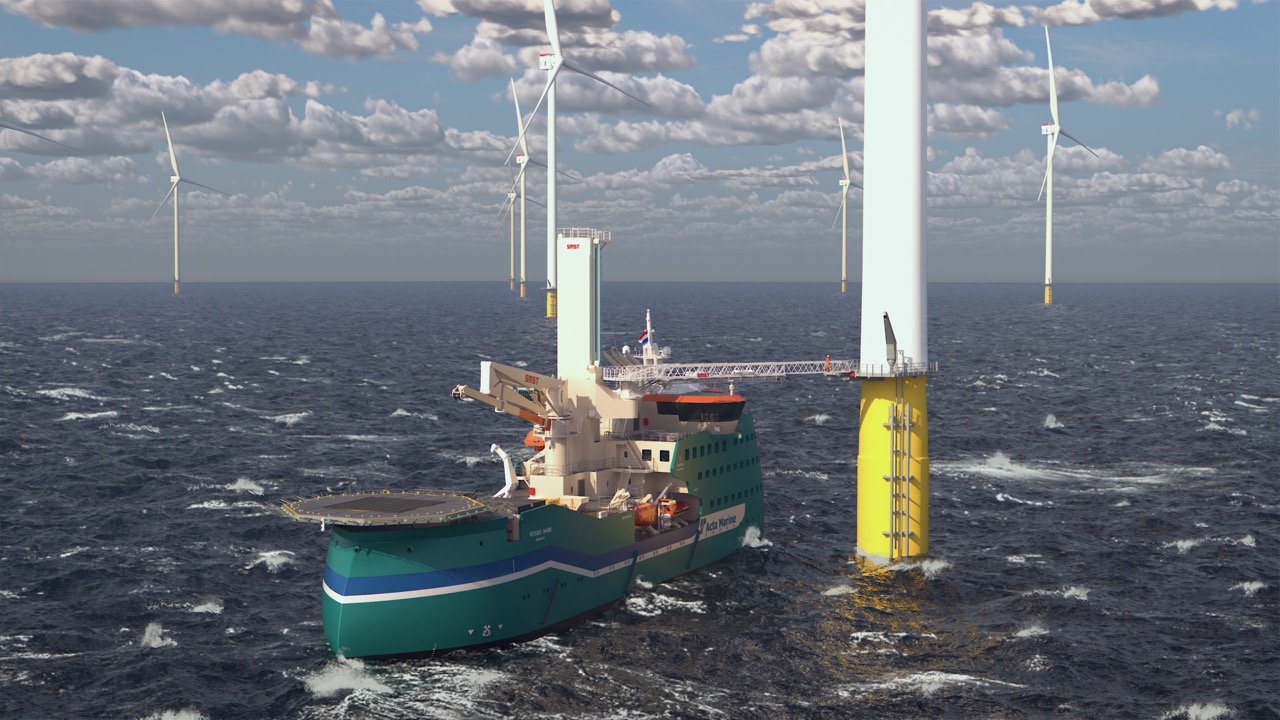
Anti-Heeling: Zero Flow
Hoppe's powerful anti-heeling system with Zero Flow ensures a stable platform
More Cases
coming soon
coming soon
-min.jpg)
Desired balance, even if it has to go fast or becomes difficult, is ensured by Hoppe's unique Floating Condition Control System, which allows users to quickly and safely adjust the float position, especially in challenging loading cases.
This flow-controlled anti-heeling and ballast system is integrated into a central control system with PLCs. A key advantage of this setup is that all required operations are fully automated, while remaining under continuous system monitoring.
The control system also includes a loading computer to simulate and optimize the ballasting process, a SCADA system, and a logging function.
The key feature of this system is to adjust the floating condition in the three degrees of freedom heel, trim and Draught automatically over a predefined path.
The system allows a flexible selection of parameters as limitations for the operation, such as bending moment limitations, tank usage, min required GMs or others.
For semi-submersible ships and floating docks this system will fully support the operators to undertake automatic docking operations safely.
In combination with a main crane, upending gripper, lifting arms, jacking legs or any other relative load & position tracking (Load Moments), the FCC System ensures a constant floating position during any transfer of load.
The load can be transferred along the vessel or from an external position. The application can be a ballast supported jacking operation, an offshore installation job, a load skidding transfer in harbour or other similar tasks you can imagine. Also tidal influence are taken into account at the same time.


SECURELOAD Loading computer with:
SECURELOAD Loading Computer with:
.png)